
2026年1月16日開催 先端共同PJ成果発表会における発表サマリー
©2026 Kouhei Shimazaki | Hiroshima University
(本コンテンツの著作権は、島﨑 航平 様に帰属いたします。)
1. 研究者紹介
広島大学 先進理工系科学研究科 准教授
島﨑 航平氏
【略歴】
2016年3月 広島大学工学部第二類(電気・電子・情報・システム)卒業
2018年3月 広島大学工学研究科 システムサイバネティクス専攻修士課程修了
2019年2月 広島大学デジタルものづくり教育研究センター 特任助教
2020年9月 広島大学工学研究科 システムサイバネティクス専攻博士課程修了
2022年12月 広島大学大学院先進理工系科学研究科 助教 2025年10月広島大学大学院先進理工系科学研究科 准教授 リアルタイム振動計測のスペシャリスト
2025年9月4日 広島大学発スタートアップ SYNRA株式会社 創業
2.研究テーマの概要
本事業の目的は、申請者が持つ目視不能な音声周波数レベルの微小振動を瞬時に見える化する振動センシング技術を軸にした、複数の関節を持つロボットの状態計測に対して、高速カメラを使用して、画素・ブロックレベルの変位・速度計算を行い、複数のカメラでステレオ計測を行い、ダイナミクス特徴量をマッチングすることで、3次元の振動挙動をモニタリングする手法を開発する。
特に、高速ビデオ画像を前提とした様々な振動信号処理アルゴリズムを提案し、ロボットの姿勢毎の3次元振動特性計測等のプロトタイプ試験を通し、従来計測では難しい微細な振動分布を捉え、ロボットアームの安定性評価を示す。
3.実験結果
(6DoF):姿勢定義と概略
姿勢1:𝜃𝛼 = 0°,𝜃𝛽 = 0°,𝜃𝛾 = 0°
姿勢2:𝜃𝛼 = −45°,𝜃𝛽 = 90°,𝜃𝛾 = −45°
姿勢3:𝜃𝛼 = −45°,𝜃𝛽 = 0°,𝜃𝛾 = 45°
姿勢4:𝜃𝛼 = −90°,𝜃𝛽 = 0°,𝜃𝛾 = 90°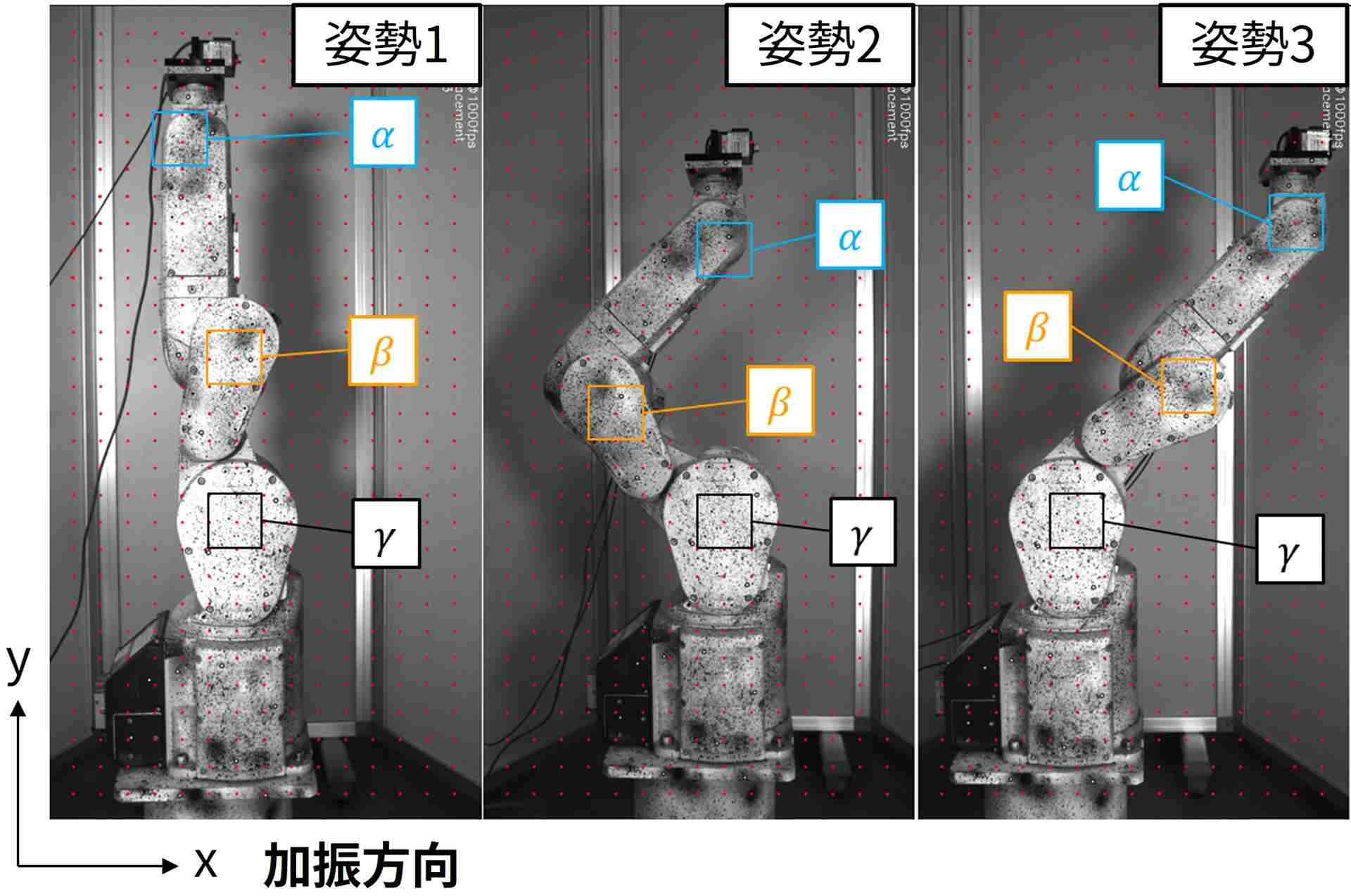
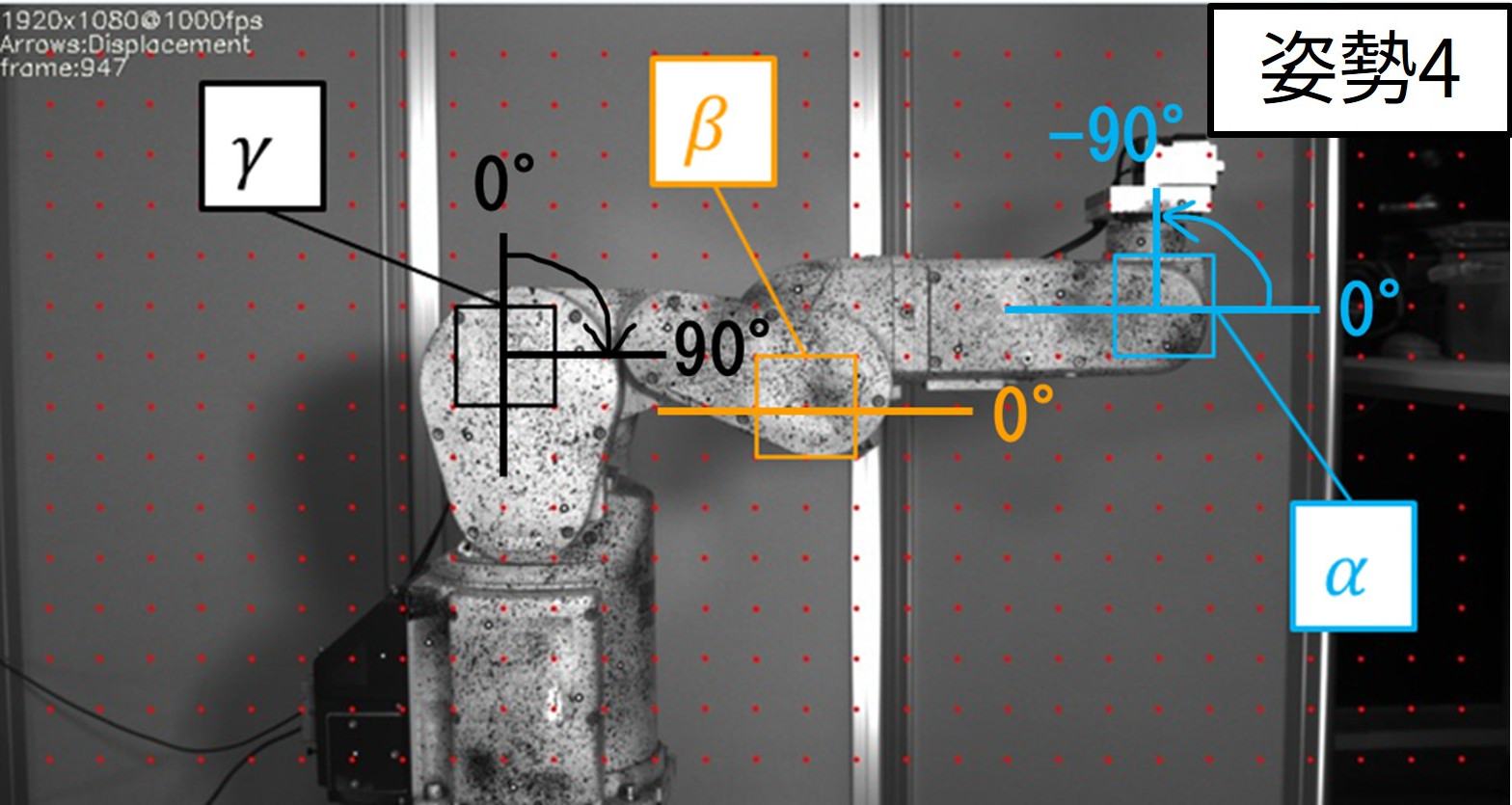
加振方向は地面と水平な方向になるように揃えている
(6DoF):3次元振動計測
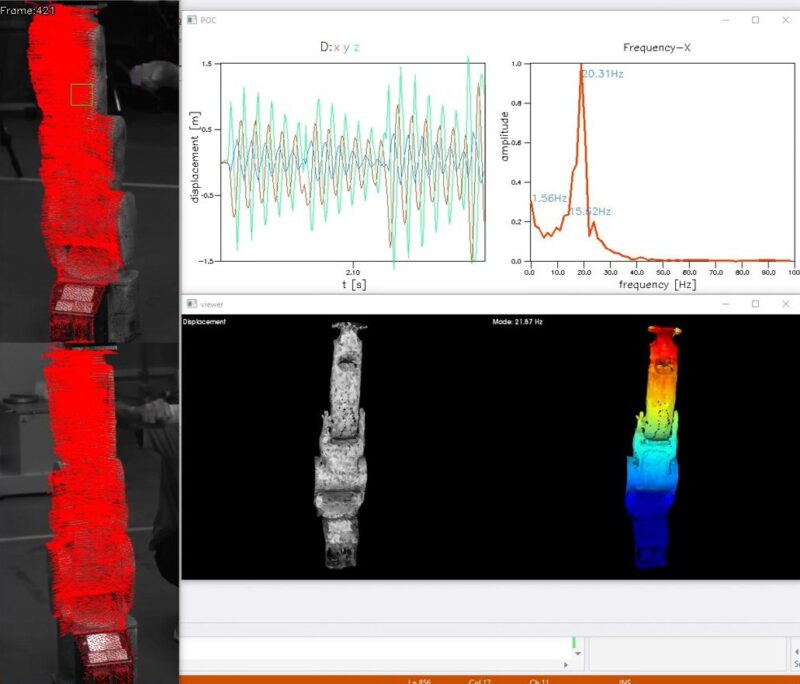
打撃試験による振動応答
振動分布計算
20Hz前後の共振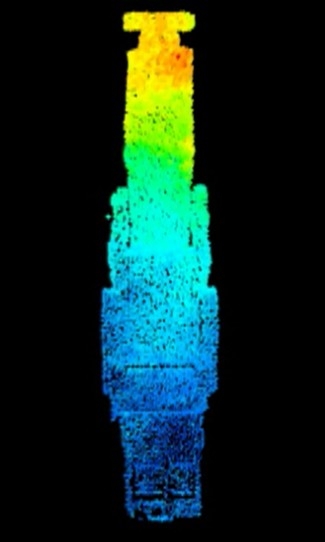
3Dスローモーション(変位は拡大表示)
(6DoF):姿勢別の共振比較
‐ Posture 1 (STANDARD)
Home: θα=0°, θβ=0°, θγ=0°
RESONANCE FREQUENCIES
19Hz 21Hz 47Hz 63Hz 98Hz
ホーム位置では、低周波から高周波まで広範囲に共振モードが分布。
‐ Posture 2 (FOLDED)
Wait 1: θα=-45°, θβ=90°, θγ=-45°
RESONANCE FREQUENCIES
15Hz 43Hz 118Hz
折りたたみ姿勢では共振点が少なく、比較的高周波(118Hz)に特徴的なピークが出現。
‐ Posture 3(EXTENDED)
Wait 2: θα=-45°, θβ=0°, θγ=45°
RESONANCE FREQUENCIES
19Hz 21Hz 59Hz 69Hz
伸展姿勢ではPosture 1に近い特性を示すが、中域の共振周波数がシフトしている(47/63Hz → 59/69Hz)。
姿勢依存性の明確な確認
Observation
3つの異なる姿勢において、共振周波数の分布が明確に異なることを確認。
特にPosture 2(118Hz)やPosture 1(98Hz)のような高周波域での共振モードの変化は、姿勢変化による構造剛性の変化を反映しており、従来の単点計測では見逃されていた現象である。
IMPLICATION
– 作業内容に応じた最適な待機姿勢の選定
‐ 姿勢変化を考慮した動的制御パラメータ調整
‐ 特定の周波数帯域を回避する動作計画
(四足):セットアップ
四足歩行ロボット振動試験概要
Unitree Go2(重量15kg)を対象に、全身458-513点を高密度にトラッキングし、垂直・水平方向の加振に対する動特性を解析。
‐ ランダムパターン塗布 ロボット表面に高コントラストのランダムパターンを塗布し、DICによる高精度追跡を実現。
‐ 正弦波掃引試験 周波数範囲: 10-100 Hz、加速度: 1 Hz/s、持続時間: 90秒で垂直・水平両方向を加振。
‐ 高速度撮影 解像度: 1920×1080、フレームレート: 500 fpsで全身の微細振動を捉える。
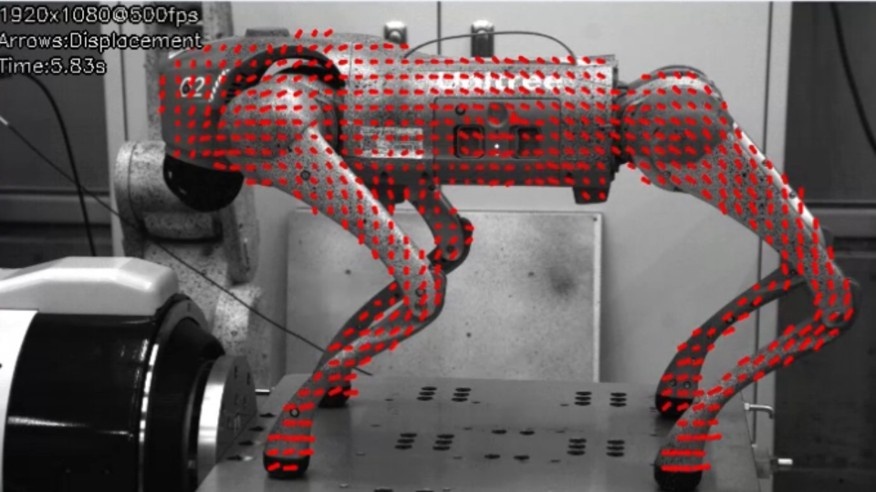
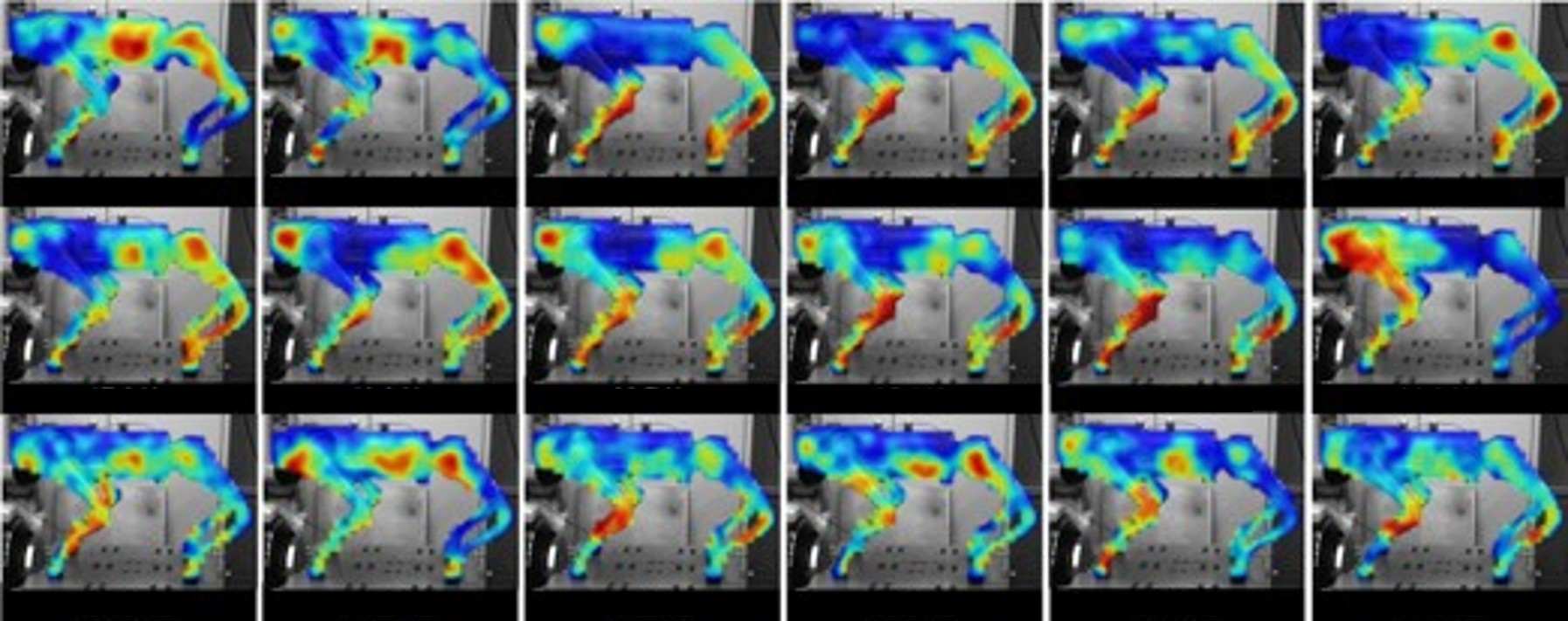
図:四足歩行ロボット(Unitree Go2)の実験セットアップとDIC計測点(458点)
(移動ドローン):まとめ
飛行中の位置・姿勢変化やトラッキングカメラによるミラーの影響を最小限に抑え、機体の局所的な挙動、ローター回転数、6自由度飛行軌跡を同時に計測した

6自由度飛行軌跡
局所的な3D速度・振動分布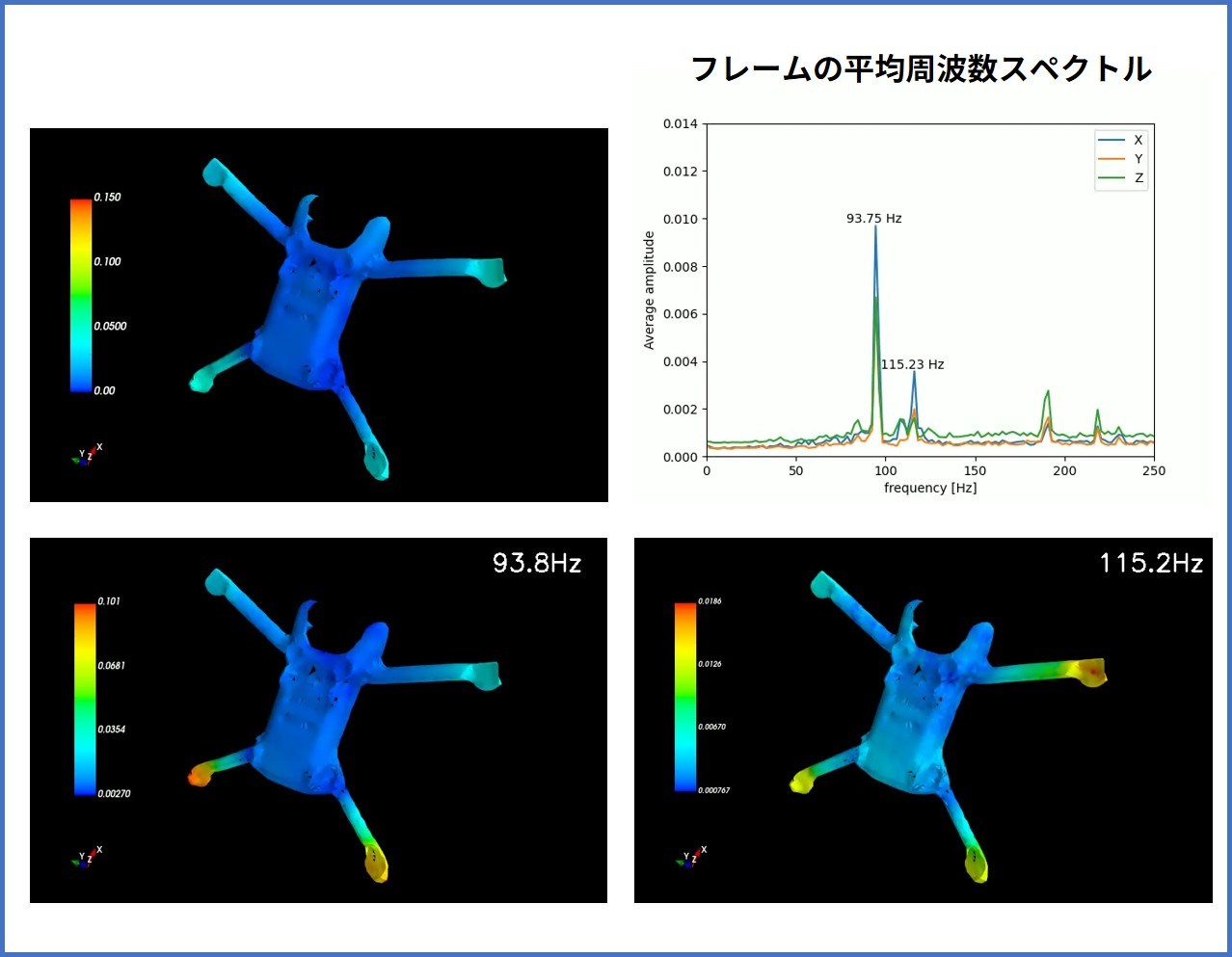
ロータ計測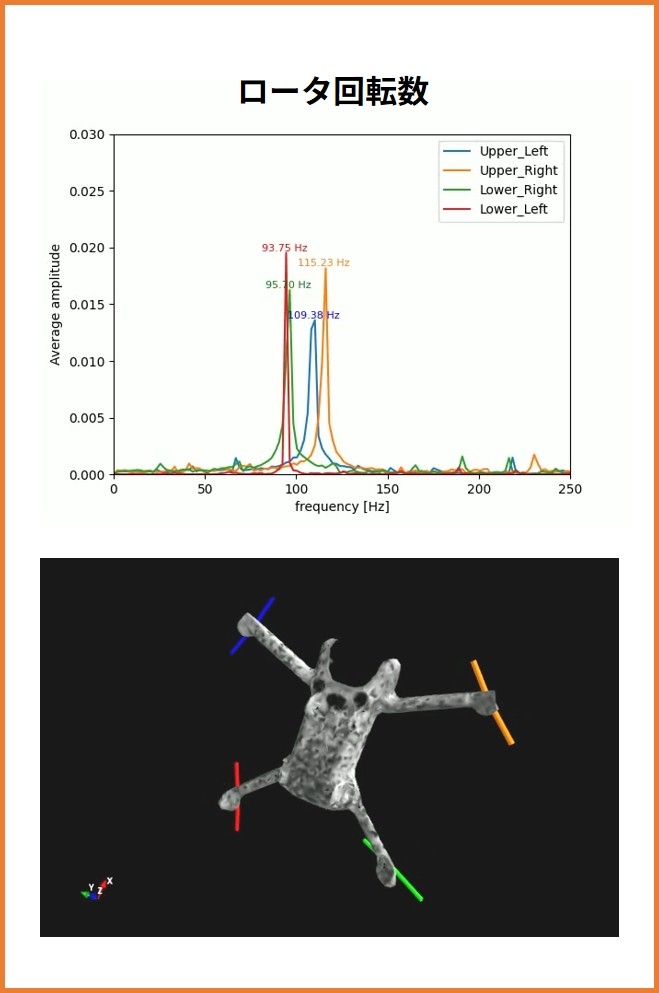
4.社会実装・国際展開(SYNRA株式会社)
広島大学発スタートアップ SYNRA株式会社
2025年9月4日創業。「Feel fast, Think fast, and Move fast」を掲げ、次世代の高速振動可視化技術を社会へ。
‐ 国際的な事業展開拠点 インドのハイデラバード拠点を設置。NEP、J-StarX、FASTAR、PSI GAP等の有力プログラムに採択され、グローバル展開を加速
‐ リアルタイム振動可視化カメラの製品化 USB接続のハンディな高速カメラシステムを製品化予定。現場で即座に振動を「見る」ことが可能に
‐ 産学連携と地域実装 中小企業との共同トライアル実施。デジタルものづくり教育研究センターと連携し、技術の社会還元を推進
広島大学スマート検査・モニタリングプロジェクトを立ち上げ、共同研究0件から12件まで拡大した経験を活かして本当の意味でのオープンイノベーションプラットフォームを目指す
5.まとめ・今後の展開
研究成果の要約
‐ 非接触・多点・高帯域計測の実現
高速カメラとDIC技術を統合し、加速度センサでは困難な面的な振動解析手法を確立
‐ ロボット姿勢依存性の定量化
6自由度ロボットの姿勢変化に伴う共振周波数のシフトと振動モード変化を3次元可視化
学術的・産業的貢献
‐ ACADEMIC
視覚計測 × ロボット動特性の統合
‐ INDUSTRIAL
予防保全・設計/制御最適化への応用
FUTURE ROADMAP
Phase 1 実時間化 Real-time Processing
Phase 2 ステレオ3D高度化 Stereo HFR 3D-DIC
Phase 3 動的デジタルツイン Dynamic Digital Twin
Phase 4 AI異常検知 AI Anomaly Detection