
2025年11月17日開催 先端共同PJ成果発表会における発表サマリー
©2025 Fumio Ito | Chuo University
(本コンテンツの著作権は、伊藤 文臣 様に帰属いたします。)
1. 研究者の紹介
中央大学 工学部 精密機械工学科 助教
伊藤 文臣 氏
【研究分野】
ロボティクス・メカトロニクス
【略歴】
中央大学理工学部精密機械工学科を卒業後、博士課程にて生体規範型ロボットや空気圧人工筋肉を用いた駆動システムに関する研究に従事。博士(工学)取得後、中央大学理工学部精密機械工学科助教に着任。これまでに、バイオインスパイアードロボティクス、管内移動ロボット、海中遊泳ロボット、柔軟アクチュエータを応用した次世代移動機構の研究を展開。国内外の学会(IEEEIROS, ICRA, AIM, CLAWAR, ISABMEC 等)で多数の発表を行っている。
2. 研究テーマの概要
本研究は、高粘性液体で満たされた狭い配管の中を効率的に移動できる遊泳ロボットの開発を目的としている。
着想のきっかけとなったのは、自然界で見られるバクテリアのべん毛運動である。バクテリアは通常、べん毛を回転させて推進するが、狭い空間ではべん毛を体に巻き付ける「ラッピング運動」を行い、流体との相互作用を巧みに利用して移動する。
本研究では、この運動原理を工学的に再現し、粘性の高い液体の中でも高効率に進むロボットを実現した。開発したロボットは、円筒ボディにらせん状のべん毛を内部モータで回転制御できる構造とした。水および高粘性液体(粘度2Pa·s)中で実験し、べん毛を体に巻き付けた「ラッピング状態」では、通常の構造に比べて最大10.7倍の速度、約9倍のエネルギー効率で推進した。
さらに、流体の動きを解析した結果、非ラッピング状態ではロボットのべん毛の周囲に循環流が生じ、液体の粘性によって推進力が低下するが、ラッピング状態では循環を減少させながら遊泳できることが明らかになった。また、小型内視鏡を搭載できる駆動構造を開発し、直径5cmの配管内で安定した走行と映像撮影を実現した。
これにより、化学プラントや食品・医薬品製造設備などにおける高粘性流体を含む配管の点検・清掃ロボットとしての応用が期待される。
本研究は、バクテリアの生物学的運動をヒントに、粘性力を「抵抗」ではなく「推進源」として活用する新しい移動原理を提案するものである。今後は、流体解析と制御技術を組み合わせた自律遊泳ロボットを開発し、液体中を自在に遊泳できる次世代の検査ロボットの実現を目指す。
3. 長距離老朽管、内部は見えない
インフラなどの基盤として利用される多数の配管が劣化しているため内部の検査が必要
長距離老朽管の内部は見えず腐食・堆積によるリスクが増大しています。既存の検査手段では細径・長距離・閉塞配管への対応が不十分で、新しい観察・走行方式が求められています。
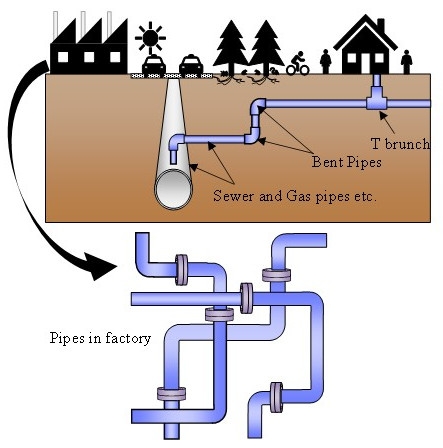
The various type of pipeline
長期利用による様々な問題
内部の検査が必要
亀裂 腐食 汚れ
The several problem of pipeline [1]
【出典】[1] Ministry of Land, Infrastructure, Transport and Tourism, Pipeline Inspection and Deterioration Examples (Sewer, Gas, Water Pipe Infrastructure). Tokyo, Japan. Accessed: Nov. 7, 2025
4. 高粘度ドロドロ液体で従来ロボは前進不可
従来のロボットは周囲との摩擦力で駆動する
ドロドロした液体で満たされた管内(工事配管や下水管)の移動が困難
高粘度流体が含まれた管内において、従来ロボットは摩擦力の発生が難しく移動できません。摩擦依存駆動は限界があり、粘度100〜1,000倍環境では移動困難です。本研究は流体推進へ視点を転換し突破を狙います。
ロボットは配管との摩擦力に依存した駆動であり、高粘性流体で満たされた配管内の移動が難しいことから放置されている。
タイヤで周囲に摩擦力発生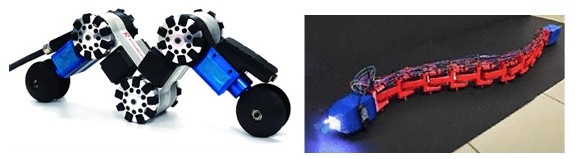
Wheeled-type[2] Snake-type[3]
膨張して周囲に摩擦力発生

Inchworm-type[4] Earthworm-type[6]
【出典】[2] Atsushi Kakogawa, Shugen Ma, “A Multi-link In-pipe Inspection Robot Composed of Active and Passive Compliant Joints,” 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) October 25-29, 2020, Las Vegas, NV, USA (Virtual)
[3] A. Selvarajan, A. Kumar, D. Sethu, M. A. B. Ramlan: “Design and Development of a Snake-Robot for Pipeline Inspection,” In Proc. of 2019 IEEE Student Conf. on Research and Development (SCOReD), Bandar Seri Iskandar, Malaysia, pp.237-242, Oct. 2019.
[4] Jinwan Lim, Hyunjun Park, Sunmoo Moon and Byungkyu Kim, “Pneumatic Robot Based on Inchworm Motion for Small Diameter Pipe Inspection,” Proceedings of the 2007 IEEE International Conference on Robotics and Biomimetics December 15 -18, 2007, Sanya, China
[5] Yuki Mano, Ryutaro Ishikawa, Yasuyuki Yamada, Member, IEEE and Taro Nakamura, “Development of Contraction Force Control System of Peristaltic Crawling Robot for Sewer Pipe Inspection,” Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, July 9-12, 2018
5. ラッピングに着目!
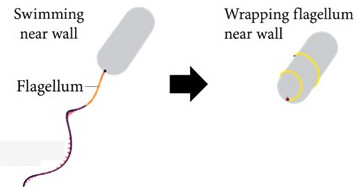
一部のバクテリアは鞭毛を体にまきつけて遊泳し、壁面近傍(狭い管内)における遊泳性能を向上
高粘度流体が含まれた管内において、従来ロボットは摩擦力の発生が難しく移動できません。摩擦依存駆動は限界があり、粘度100〜1,000倍環境では移動困難です。本研究は流体推進へ視点を転換し突破を狙います。
バクテリアの狭所空間からの脱出方法
鞭毛を逆回転することで、鞭毛を体に巻き付ける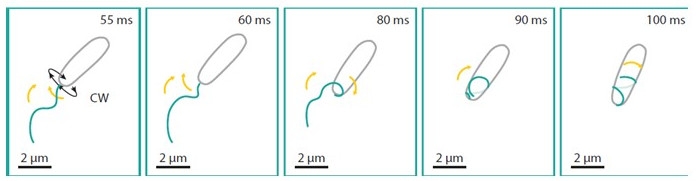
狭い空間(壁面近傍)における遊泳を可能にする
鞭毛のボディへの巻き付き変形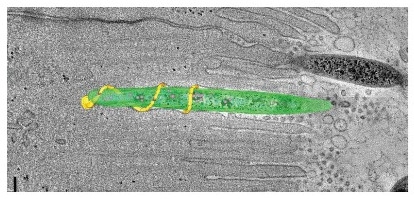
バクテリアによるべん毛のラッピング
研究開発フェーズ
①水中における遊泳性能遊泳速度を比較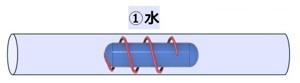
遊泳速度を比較
②高粘性流体中における遊泳性能遊泳速度を比較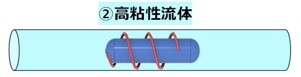
遊泳効率を比較
③べん毛付近の流れ場観測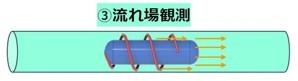
PIVを実施 (*Particle Image Velocimetryの略)
④内視鏡への応用カメラを搭載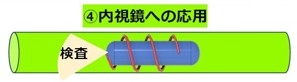
カメラを搭載
【出典】[6] M. J. Kühna, F. K. Schmidtb, B. Eckhardtb, and K. M. Thormanna, “Bacteria exploit a polymorphic instability of the flagellar filament to escape from traps,” In Proc. of the National Academy of Sciences (PNAS), Vol. 11, Issue 24, pp. 6340-6345, May, 2017.
[7] K. M. Thormann, C. Beta, M. J. Kühn, “Wrapped Up: The Motility of Polarly Flagellated Bacteria. Annu Rev Microbiol.,” 2022 Sep 8;76:349-367. doi: 10.1146/annurev-micro-041122-101032. Epub 2022 Jun 1. PMID: 35650667.
6. 水中200mm/sで推進を確認
水で満たされた管内で平均200mm/sの自走を確認しました。細径管・太径管とも安定遊泳し、基本推進原理が成立しました。
開発したロボットの外観
非ラッピング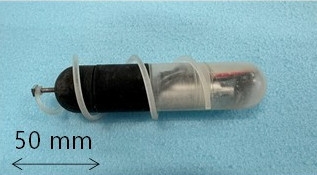
ラッピング
水中における遊泳性能の比較結果(下図)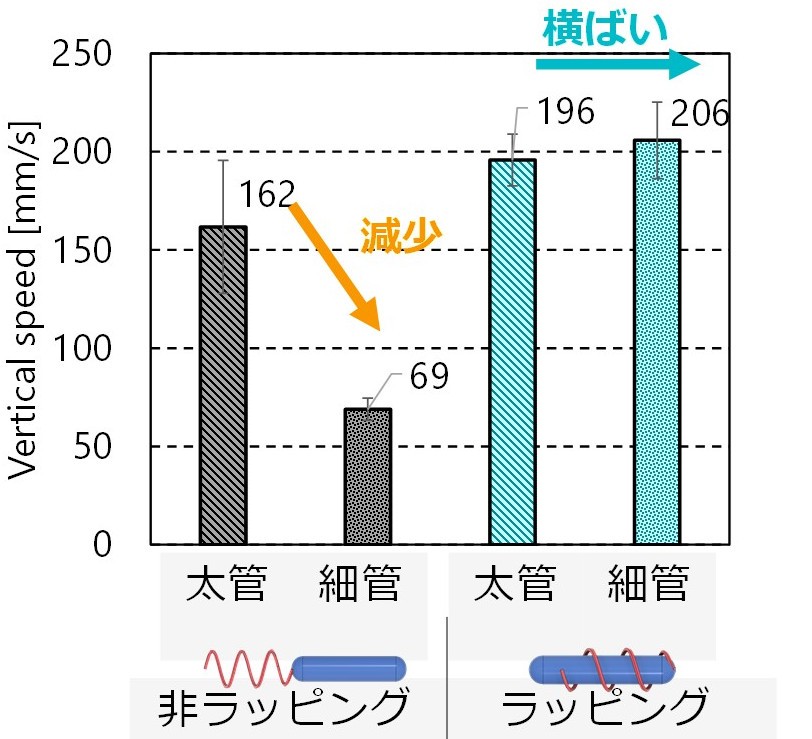
遊泳速度の比較実験の結果
7. 高粘度下で速度10.7倍、効率4倍
べん毛をラッピングしたバクテリア型ロボットを試作した.はちみつと同程度のドロドロ液体で満たされた管内における移動効率を10倍向上した
粘度の高い液体で満たされた管内で速度が最大10.7倍、消費電力は約39%まで低減させました。小型配管内でも推進できたことは検査応用の可能性を大きく広げます。
開発したロボットの高粘性流体で満たされた配管内の遊泳の様子
ラッピング
非ラッピング
粘度:2Pas以上
開発したロボットの高粘性流体で満たされた配管内の遊泳における遊泳速度とモータのエネルギ消費(下図)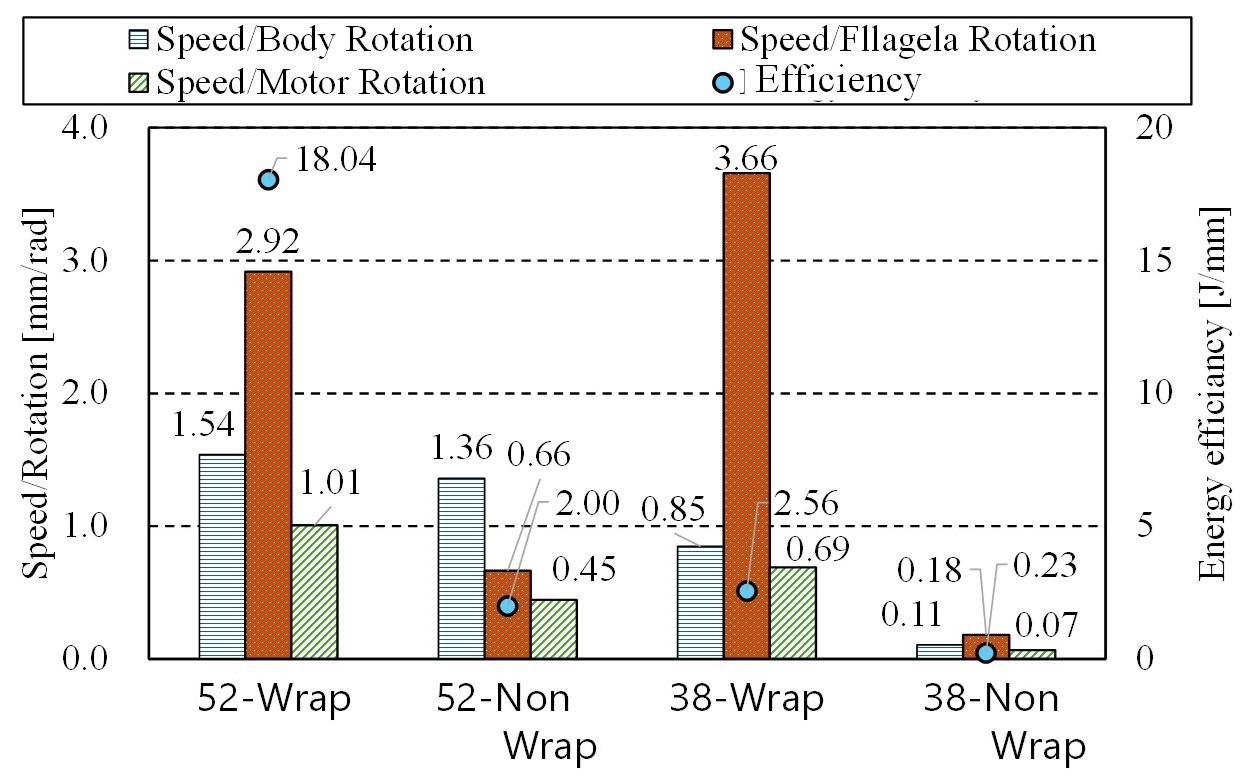
8. PIVで損失要因を可視化
PIVによって流れ場を解析、べん毛周りに循環する流れを観測
Particle Image Velocimetry(粒子画像流速測定法)で非ラッピング時に強い循環流が発生し推力損失が増大することを確認しました。ラッピングでは巻き込みが抑制され効率化。物理的裏付けにより設計方針が明確となりました。
‐ 鞭毛周りに循環するように流体が流れた
‐ もしもボディがべん毛の内側にあるとき流体が後方へ流れやすい
PIVによる流れ場の観測実験の結果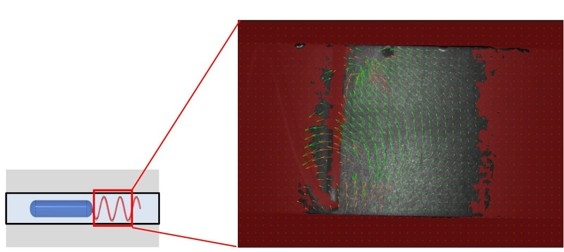
PIVによる流れ場の観測実験の結果に対する考察
太管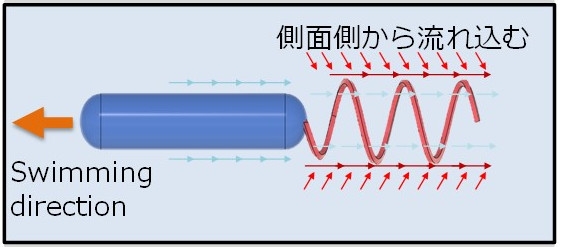
Wrapping type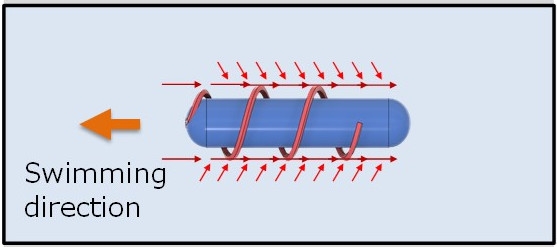
Non-wrapping type
細管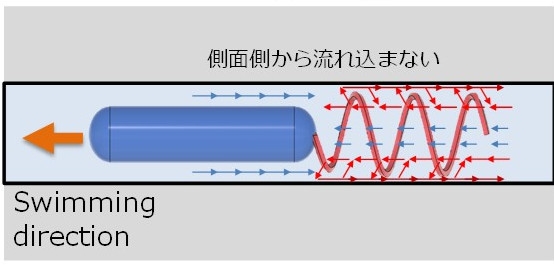
Wrapping type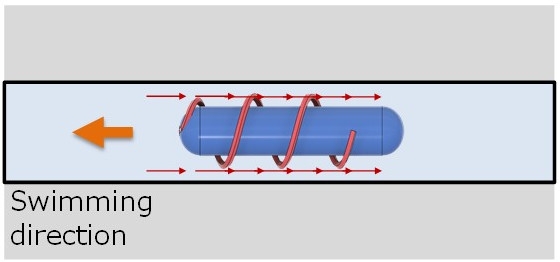
Non-wrapping type
9. 52mm 曲管を通過、内視鏡搭載
設計した内視鏡搭載型の遊泳ロボットを開発
内視鏡搭載型を開発しφ40〜52mm曲管を通過。視認と推進を同時に実現しケーブル絡みも無し。検査ツールではなく“見ながら前進できる診断ロボット”としての実用性を示した。
開発したロボットの外観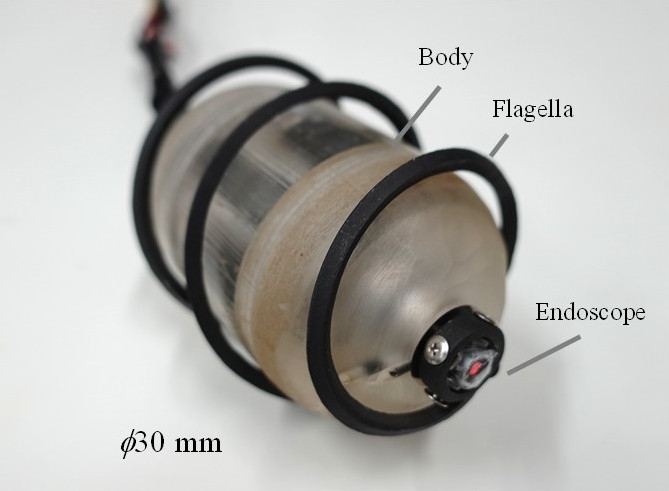


内視鏡の配線にべん毛が絡まることなく駆動
自走式内視鏡の応用可能性
空気中/水中ともに内視鏡を公転し、絡まらず防水駆動
空気中で駆動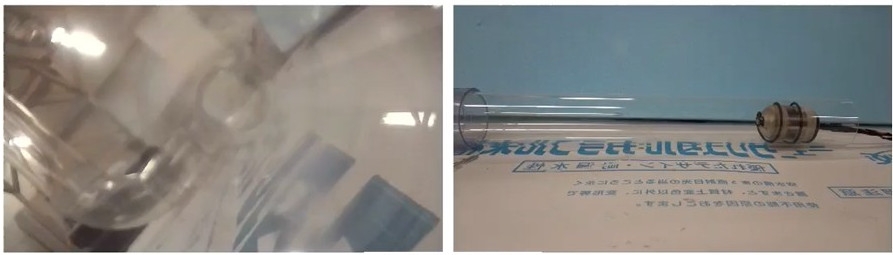
空気中: 外部を視認可
水中で駆動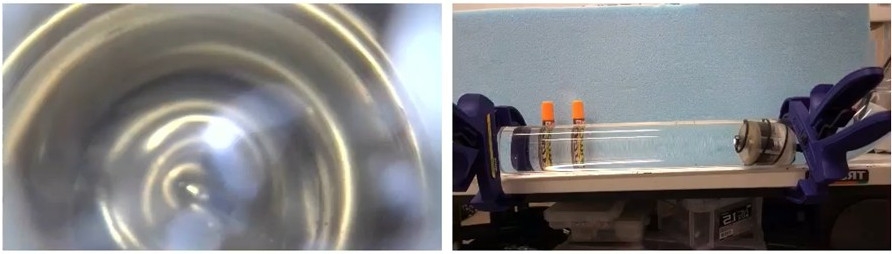
水中:外部を視認難
内視鏡として応用に期待
10. 研究成果
本研究が完成すると、摩擦力・粘性力を複合的に発揮して管内の推進を実現でき、工場の流体輸送配管などの従来の手法では検査が困難であった配管の検査の実現に期待できる。したがって、現在は検査ができずに放置されている配管内の検査による衛生面の向上や破損個所の特定の効率化に期待できる。
さらに、この技術により配管内の情報を統合することで、検査清掃に関する提案などの DX 化につながる。また、開発するロボットは、生物を規範としていることから、バクテリアのべん毛の変形の要因の解明を期待できる。
したがって、本研究は工学及び生物学といった学際的な分野における応用が期待でき、低レイノルズ数流体内の移動方法とその応用に貢献する可能性を有する。